(x,y,z,w) in OpenGL/Direct3D (Homogeneous Coordinates)
I always wondered why 3D points in OpenGL, Direct3D and in general computer graphics were always represented as (x,y,z,w) (i.e. why do we use four dimensions to represent a 3D point, what’s the w for?). This representation of coordinates with the extra dimension is know as homogeneous coordinates. Now after finally getting formally taught linear algebra I know the answer, and its rather simple, but I’ll start from the basics.
Points can be represented as vectors, eg. (1,1,1). Now a common thing we want to do in computer graphics is to move this point (translation). So we can do this by simply adding two vectors together,
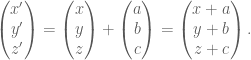
If we wanted do some kind of linear transformation such as rotate about the origin, scale about the origin, etc, then we could just multiply a certain matrix with the point vector to obtain the image of the vector under that transformation. For example,
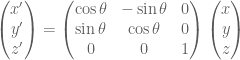
will rotate the vector (x,y,z) by angle theta about the z axis.
However as you may have seen you cannot do a 3D translation on a 3D point by just multiplying a 3 by 3 matrix by the vector. To fix this problem and allow all affine transformations (linear transformation followed by a translation) to be done by matrix multiplication we introduce an extra dimension to the point (denoted w in this blog). Now we can perform the translation,

by a matrix multiplication,
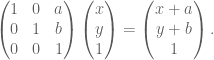
We need this extra dimension for the multiplication to make sense, and it allows us to represent all affine transformations as matrix multiplication.
REFERENCES:
Homogeneous coordinates. (2008, September 29). In Wikipedia, The Free Encyclopedia. Retrieved 04:33, September 29, 2008, from http://en.wikipedia.org/w/index.php?title=Homogeneous_coordinates&oldid=241693659
I don't read comments anymore due to an increase in spam comments. If you want to get in touch please send me an email (see tianjara.net for details).
 Google Reader Shared Items
Google Reader Shared Items
- An error has occurred; the feed is probably down. Try again later.
License

The content on this blog by Andrew Harvey, unless otherwise noted is licensed under a Creative Commons Attribution-Share Alike 3.0 Australia License.

OK, but why do matrices in openGL have sixteen values, rather than twelve? What are the other four?
(I think, though am not sure) Because if you have a matrix A times a vector B of dimension 4, then the matrix A will need to have 4 columns for the multiplication to make sense, and it will have 4 rows (probably) because the resulting vector needs 4 rows. I’m not to sure but some perspective transformations utilise this.
If you are interested in learning more about this, you should take MATH5785 Geometry next time it runs
Yeh, that course looks great. I hope I can find space to do it.
Thanks for the explain. The 2D translation using matrix math really illustrates it.
louda explanation…
sorry lauda explanation…